¿Qué es la robótica?
¿QUÉ ES UN ROBOT INDUSTRIAL?
Existen ciertas dificulatades a la hora de establecer una definición formal de lo que son los robots industriales o también comunmente llamados robots manipuladores; la primera de ellas surge de la diferencia conceptual entre el mercado japonés y el euro-americano de lo que es un robot y lo que es un manipulador. Así, mientras que para los japoneses un robot industrial es cualquier dispositivo mecánico dotado de articulaciones móviles destinado a la manipulación, el mercado occidental es más restrictivo, exigiendo una mayor complejidad, sobre todo en lo relativo al control. En segundo lugar, y centrándose ya en el concepto occidental, aunque existe una idea común acerca de lo que es un robot industrial, no es fácil ponerse de acuerdo a la hora de determinar una definición formal. Además, la evolución de la robótica ha ido obligando a diferentes actualizaciones de su definición. Algunas de las definiciones son:
Existen ciertas dificulatades a la hora de establecer una definición formal de lo que son los robots industriales o también comunmente llamados robots manipuladores; la primera de ellas surge de la diferencia conceptual entre el mercado japonés y el euro-americano de lo que es un robot y lo que es un manipulador. Así, mientras que para los japoneses un robot industrial es cualquier dispositivo mecánico dotado de articulaciones móviles destinado a la manipulación, el mercado occidental es más restrictivo, exigiendo una mayor complejidad, sobre todo en lo relativo al control. En segundo lugar, y centrándose ya en el concepto occidental, aunque existe una idea común acerca de lo que es un robot industrial, no es fácil ponerse de acuerdo a la hora de determinar una definición formal. Además, la evolución de la robótica ha ido obligando a diferentes actualizaciones de su definición. Algunas de las definiciones son:
- Un robot industrial es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas (RIA, Robotic Industry Association).
- Manipulador multifuncional reprogramable con varios grados de libertad, capaz de manipular materias, piezas, herramientas o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas (ISO, Oraganización Internacional de Estándares).
- Manipulador automático servo-controlado, reprogramable, polivalente, capaz de posicionar y orientar piezas, útiles o dispositivos especiales, siguiendo trayectoria variables reprogramables, para la ejecución de tareas variadas. Normalmente tiene la forma de uno o varios brazos terminados en una muñeca. Su unidad de control incluye un dispositivo de memoria y ocasionalmente de percepción del entorno. Normalmente su uso es el de realizar una tarea de manera cíclica, pudiéndose adaptar a otra sin cambios permanentes en su material. (AFNOR , Asociación Francesa de Normalización).
- Máquina de manipulación automática, reprogramable y multifuncional con tres o más ejes que pueden posicionar y orientar materias, piezas, herramientas o dispositivos especiales para la ejecución de trabajos diversos en las diferentes etapas de la producción industrial, ya sea en una posición fija o en movimiento (IFR ,Federación Internacinal de Robótica).
Leyes de la robótica (Isaac Asimov 1945):
1. Un robot no puede perjudicar a un ser humano, ni con su inacción permitir que un ser humano sufra daño
2. Un robot ha de obedecer las órdenes recibidas de un ser
humano, excepto si tales órdenes entran en conflicto con la primera
ley
3. Un robot debe proteger su propia existencia mientras tal
protección no entre en conflicto con la primera o segunda ley
1. Un robot no puede perjudicar a un ser humano, ni con su inacción permitir que un ser humano sufra daño
2. Un robot ha de obedecer las órdenes recibidas de un ser
humano, excepto si tales órdenes entran en conflicto con la primera
ley
3. Un robot debe proteger su propia existencia mientras tal
protección no entre en conflicto con la primera o segunda ley

HISTORIA
Por siglos el ser humano ha construido máquinas que imiten las partes del cuerpo humano. Los antiguos egipcios unieron brazos mecánicos a las estatuas de sus dioses. Estos brazos fueron operados por sacerdotes, quienes clamaban que el movimiento de estos era inspiración de sus dioses. Los griegos construyeron estatuas que operaban con sistemas hidráulicas, los cuales se utilizaban para fascinar a los adoradores de los templos.
Durante los siglos XVII y XVIII en Europa fueron construidos muñecos mecánicos muy ingeniosos que tenían algunas características de robots.
Ejemplos:
Por siglos el ser humano ha construido máquinas que imiten las partes del cuerpo humano. Los antiguos egipcios unieron brazos mecánicos a las estatuas de sus dioses. Estos brazos fueron operados por sacerdotes, quienes clamaban que el movimiento de estos era inspiración de sus dioses. Los griegos construyeron estatuas que operaban con sistemas hidráulicas, los cuales se utilizaban para fascinar a los adoradores de los templos.
Durante los siglos XVII y XVIII en Europa fueron construidos muñecos mecánicos muy ingeniosos que tenían algunas características de robots.
Ejemplos:
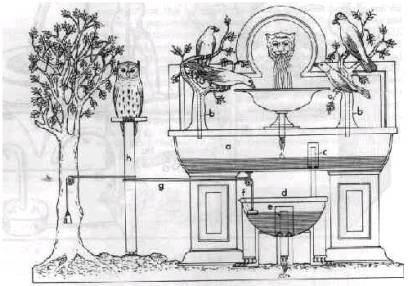
- Fuente de pájaros cantores de Herón de Alejandría.
- Gallo de Estrasburgo.
- Escriba de Jacques Droz.
- Jacques de Vauncansos construyó varios músicos de tamaño humano a mediados del siglo XVIII.
- En 1805, Henri Maillardert construyó una muñeca mecánica que era capaz de hacer dibujos. Una serie de levas se utilizaban como ‘ el programa ’ para el dispositivo en el proceso de escribir y dibujar.
- La hiladora mecánica de Crompton (1779).
- El telar mecánico de Cartwright (1785)